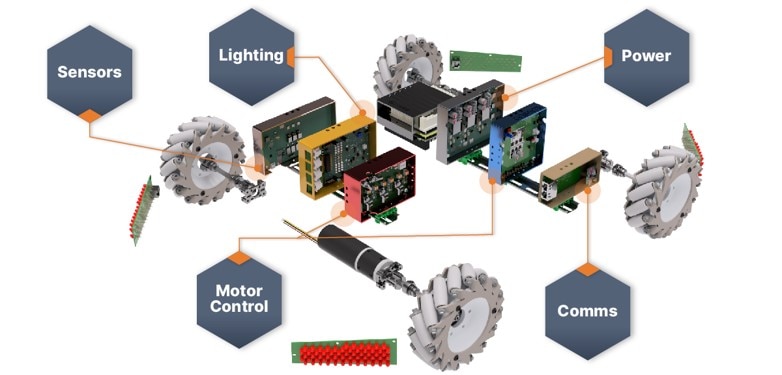
자율 이동 로봇
onsemi의 자율 이동 로봇 개념은 높은 효율의 혁신적 솔루션으로 설계된 포괄적인 로봇 공학 솔루션입니다. 이 개념은 onsemi의 다양한 지능형 및 전력 솔루션을 결합하여 다양한 유형의 로봇, 코봇, 전동 공구 및 자율 주행차를 설계하는 데 사용할 수 있습니다.
- BLDC 모터 제어 키트
- 배터리 충전 및 전력 변환
- 이미지 센서 및 Lidar 솔루션
- 연결 솔루션
- LED 조명
- 산업용 코봇 및 로봇
- 창고 로봇
- 배달 로봇
- 전동 공구
- 농업용 로봇
- 잔디깎이
- 자율 주행 차량

자율 주행 모바일 로봇 동영상 -

2024 Embedded World 인터뷰 -

기술 이야기: 로봇 공학과 물리적 AI -
- BLDC 모터 제어 솔루션
- 감지 솔루션
- 전력 솔루션
- 조명 솔루션
- 커뮤니케이션 솔루션
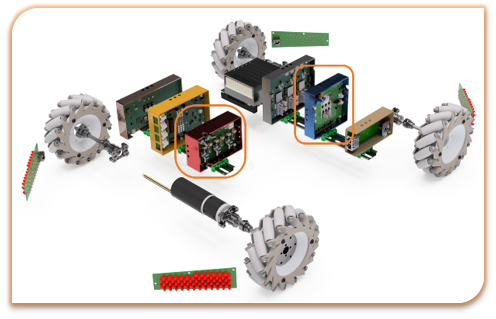
BLDC 모터 제어 솔루션
BLDC 모터 제어 솔루션이 있으며 세 가지 다른 플랫폼을 선택할 수 있습니다. 첫 번째는 에코스핀 기반 통합 모터 개발선입니다. 이는 모터 BLDC 제어를 위해 완벽하게 통합된 솔루션입니다. 여기에는 부트스트랩 다이오드가 통합되어 있습니다. 감지 증폭기, 게이트 구동기 및 마이크로 컨트롤러도 포함되어 있습니다. 펌웨어를 사용할 수 있습니다.
두 번째 솔루션은 개별 게이트 구동기와 MOSFET을 사용하는 Xilinx 기반 시스템입니다. 모터 제어 수준에서 더 많은 컴퓨팅 성능이 필요한 플랫폼에 사용할 수 있습니다.
마지막으로 전동 공구 기반 솔루션이 있습니다.
주요 제품




감지 솔루션
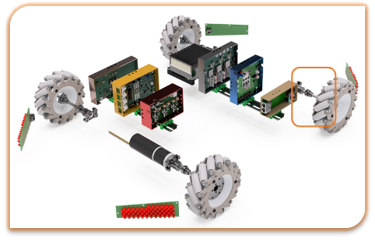
자율형 로봇은 이동 동선을 확인해야 하므로 이미지 센서와 카메라 모듈이 필요합니다. 데모 버전에서는 E-con USB 카메라 모듈을 사용합니다. 이 버전에서는 자율형 로봇에 적합한 글로벌 셔터 이미지 센서를 사용합니다. 글로벌 셔터 센서는 각 이미지의 픽셀 데이터를 동시에 저장합니다. 이러한 유형의 센서에는 롤링 셔터 센서에서 볼 수 있는 모션 아티팩트가 없으므로 현장이나 창고 바닥을 이동할 때 이상적입니다. 롤링 셔터 센서는 글로벌 셔터 센서보다 다이내믹 레인지가 높으므로 조명 조건의 차이가 심한 곳에서 원활하게 작동합니다. 그러나 현장에서 작업하는 자율형 로봇의 경우 조명 조건은 글로벌 셔터 센서를 사용하기에 적합합니다. AR0234CS 이미지 센서는 초당 60프레임 속도로 풀 HD 이미지를 지원합니다.
팔을 움직일 수 있는 자율형 로봇은 서보 모터를 사용하여 팔과 그래버의 위치를 제어합니다. 이를 위해서는 정확한 위치 피드백이 필요합니다. 또한 자율형 로봇의 전원을 껐다가 다시 켰을 때 팔의 정확한 위치를 아는 것이 중요합니다. 절대 위치 센서를 사용하면 언제든지 팔의 위치를 결정할 수 있습니다. 광학 센서를 사용하여 이를 수행할 수도 있지만 외부 부품이 많이 필요하고 온도 변화에 민감합니다. Onsemi는 자동차 시장에 고신뢰성 맞춤형 위치 센서를 공급하는 업체입니다. 이러한 경험을 바탕으로 NCS32100 센서 컨트롤러를 사용하는 이중 유도 위치 센서 솔루션을 개발했습니다. 이 제품에 대한 자세한 내용은 이 프레젠테이션의 뒷부분에 설명되어 있습니다.
주요 제품






전력 솔루션
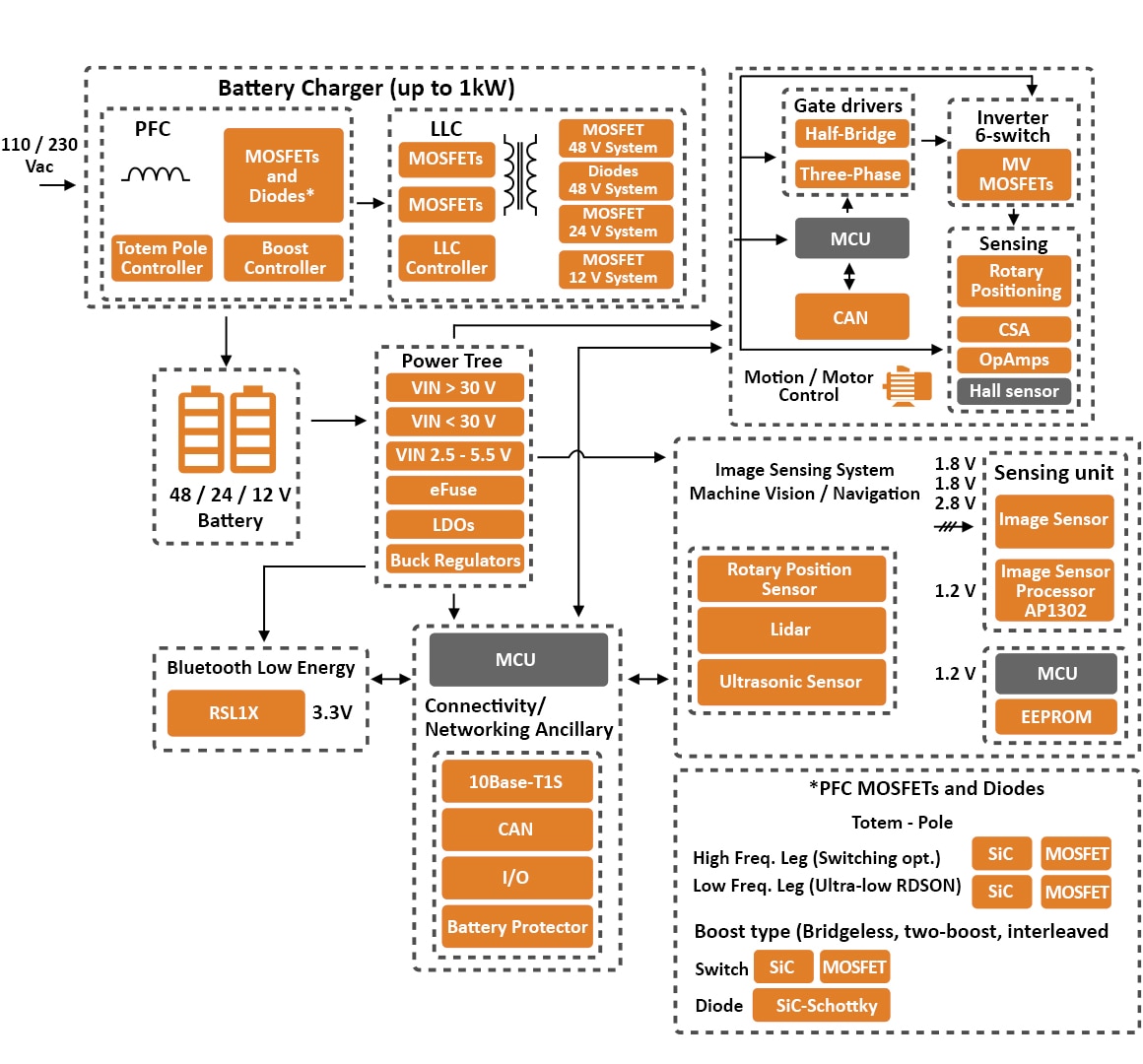
이제 자율형 로봇의 전원 공급 장치를 살펴보겠습니다. 배터리 전원이 꺼져 있지만 일정 시점에서는 배터리를 충전해야 합니다. 자율형 로봇은 전력 충전 지점까지 운전할 수 있는 지능을 갖추고 있습니다. 외부 로봇 팔은 전원 케이블을 자율 로봇에 연결하여 로봇을 충전합니다.
자율형 로봇용 600W AC 주 입력 배터리 충전기는 PFC 스테이지, 분리형 LLC 컨버터, 벅 컨버터의 세 부분으로 구성됩니다. PFC 스테이지는 NCP1632 PFC 컨트롤러를 사용하는 이중 인터리브 PFC 스테이지입니다. 이렇게 하면 AC 회선에서 끌어온 전력의 역률이 우수하며 전체 고조파 왜곡이 낮습니다. LLC 스테이지는 중앙 탭 하프브리지 토폴로지를 갖춘 LLC 토폴로지를 사용하여 400VDC와 같은 PFC 스테이지의 출력을 48V DC 출력 전압으로 변환합니다. 기존 설계에서는 NCP1399가 사용되며 최신 설계에는 고급 NCP13994가 권장됩니다. 2개의 NCP4305D 동기 정류 컨트롤러로 제어되는 2개의 FDMS86202ET 중전압 MOSFET을 사용하여 출력을 동기식으로 정류합니다.
배터리 충전에는 광범위한 작동 전압을 제공하는 정전류 충전 모드가 포함되어 있습니다. LLC 스테이지는 전압 변환 비율 또는 이득에 대한 작동 범위가 협소하기 때문에 정전류 모드에서는 원활하게 작동하지 않습니다. 자율형 로봇 충전기에는 FAN65008을 사용하는 세 번째 벅 스테이지가 있습니다. 이 스테이지는 매우 광범위한 전압 변환 비율로 작동할 수 있으므로 배터리 충전에 필요한 전류 및 전압 프로파일을 쉽게 제공할 수 있습니다.
주요 제품

 구동기 범용 전력 MOSFET 10-DFN(4x4)")

 291W(Tc) 스루홀 TO-247-3")





, 102A(Tc) 3.3W(Ta), 187W(Tc) 표면 실장 8-PQFN(5x6)")

조명 솔루션
Onsemi의 자율형 로봇 솔루션에는 LED 조명이 장착되어 사람과 다른 로봇에게 쉽게 나타낼 수 있습니다. 추가 LED 조명을 사용하여 신호를 전송합니다. Onsemi는 자동차 및 산업용 차량 시장에 헤드라이트, 후미등, 주간 주행등 및 신호등 솔루션을 공급하는 업체입니다. Onsemi는 광범위한 포트폴리오에서 자율형 로봇에 사용할 두 가지 제품을 선택했습니다.
NCV7685 자동차 LED 미등 솔루션은 사용이 간편한 구동기 + 통합 MOSFET 솔루션입니다. I2C 인터페이스를 통해 PWM 제어되는 12개의 병렬 60mA 채널이 있습니다. 설계자가 외부 마이크로 컨트롤러 없이 LED 구동기를 작동하려는 경우 특정 OTP 레지스터를 사전 프로그래밍하여 듀티 사이클을 설정할 수 있습니다. LED 구동기에는 전류를 설정하는 핀의 단락 조건, I2C 통신 오류, 열 경고, 열 차단 및 개방 부하 조건과 같은 특정 오류를 감지하기 위해 마이크로 컨트롤러가 다시 판독할 수 있는 오류 진단 기능이 있습니다. 이러한 정보를 사용하여 마이크로 컨트롤러에서 로컬 자율형 로봇을 모니터링하는 중앙 호스트 컨트롤러에 오류를 다시 전달하는 등 필요한 수정 조치를 지원할 수 있습니다.
주요 제품

NCV7685DQR2G
세부 정보 보기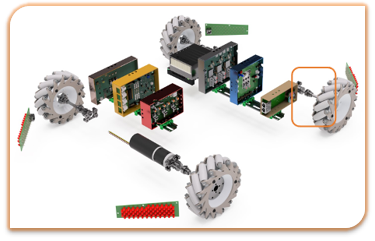
커뮤니케이션 솔루션
전통적으로 로봇 공급업체는 BLDC, 조명, 프로세서, 일부 센서 등 로봇 내 다양한 노드 간 유선 통신을 위해 자동차 CAN 프로토콜을 선택했습니다. CAN은 수십 년 동안 멀티드롭 또는 데이지 체인 토폴로지에서 가볍고 저렴한 비차폐 연선(UTP) 배선을 사용하여 노드 간 2Mbps ~ 5Mbps의 통신을 간편하게 구현해왔습니다. 로봇의 자율성이 높아지고 인간과 더욱 조화롭게 일하게 됨에 따라 로봇의 지능도 강화되어야 합니다. 로봇에 라이더, 이미지 센서, 초음파, 레이더, 유도 위치 센서 등 더 많은 프로세싱과 센서를 추가함으로써 로봇의 지능이 향상됩니다. 이미지 센서와 라이더는 기가비트 이더넷과 같이 더 빠른 데이터 전송률을 요구하는 프로세서 노드에 대해 더 많은 지점 간(p2p) 통신 링크를 구동합니다. CAN의 한 가지 단점은 프로토콜이 다르기 때문에 이더넷과 CAN 사이에 게이트웨이가 필요하다는 점입니다.
2019년 Ethernet Alliance는 "All-Ethernet" CAN을 대체하기 위해 10BASE-T1S에 대한 IEEE802.3cg 표준을 비준했습니다. 10BASE-T1S를 사용하면 동일한 2개의 전선(SPE: Single Pair Ethernet)에서 CAN보다 2 ~ 3배 빠르게 통신할 수 있으며, Onsemi의 NCN26010 또는 NCN26000 컨트롤러를 사용하여 게이트웨이 비용과 무게를 줄일 수 있습니다.











