중소기업에서 산업용 메타버스를 사용하여 로봇 솔루션을 신속하게 탐색하고 배포하는 방법
DigiKey 북미 편집자 제공
2024-11-21
로봇과 협동 로봇(코봇)은 공장 자동화 기술 혁신의 선봉에 있으며, 디지털 트윈과 가상 현실(VR)은 설계 및 개발 도구 혁신의 선봉에 있습니다. 이러한 기술을 결합하면 중소기업에서도 더 높은 생산성을 더 빠르게 제공하는 산업 메타버스를 구축할 수 있습니다.
중소기업의 설계자는 델타, 선형 또는 다축 로봇과 같은 물리적 물체의 매우 상세한 가상 모델인 디지털 트윈과 로봇의 이동 시퀀스를 직접 실행하고 확인할 수 있는 3차원(3D) VR 환경을 결합한 간단하고 직관적인 인터페이스의 이점을 누릴 수 있습니다.
이러한 기능을 사용하면 물리적 하드웨어 없이도 자동화 시스템의 미세 조정 및 최적화를 지원하고 다양한 솔루션 가능성을 빠르게 탐색할 수 있습니다.
이 기사에서는 먼저 수학적 데이터로 설명되는 디지털 트윈과 시각적 디지털 트윈(VR 트윈)의 차이점과 산업용 메타버스를 만드는 데 이 두 가지가 어떻게 필요한지 살펴봅니다. 그런 다음 물리적 하드웨어를 사용하지 않고 3D 인터페이스(시각적 디지털 트윈)에서 로봇을 시뮬레이션하는 데 사용할 수 있는 Igus의 로봇 제어 시스템 및 관련 소프트웨어와 최적화된 델타, 선형 및 다축 로봇을 구현하는 데 사용할 수 있는 호환 가능한 로봇을 소개합니다.
디지털 트윈과 VR은 서로 다른 시각화 형식, 상호 작용 및 하드웨어를 사용하는 상호 보완적인 기술입니다. 디지털 트윈은 물리적 객체, 시스템 또는 프로세스의 데이터 기반 모델이며, 초기 구상부터 폐기 및 재활용에 이르기까지 모델링 대상의 전체 수명 주기 동안 사용할 수 있도록 설계되었습니다.
VR은 디지털 모델을 사용하는 몰입형 시각 기반 기술로, VR 환경에서는 로봇이 작업을 수행하는 것처럼 사물 간의 관계와 상호 작용을 시뮬레이션할 수 있습니다. 따라서 두 기술 모두 설계 및 시뮬레이션에 사용할 수 있지만, 디지털 트윈 기술은 전반적인 수명 주기 고려 사항에 초점을 맞추고 VR은 물리적 객체 간의 상호 작용에 중점을 둡니다.
메타버스는 디지털 트윈과 VR을 결합하여 디지털 오브젝트와 사람 간의 실시간 상호작용을 지원하는 특수 목적의 가상 환경을 구축합니다. 흔히 게임과 연관되어 있지만 비즈니스 및 산업 활동에도 점점 더 많이 적용되고 있습니다.
이구버스(iguverse) 소개
Igus는 로봇 시스템 개발 및 배포와 같은 산업 환경에서의 엔지니어링 상호 작용을 지원하기 위해 이구버스(iguverse) 메타버스를 개발했습니다. 이구버스는 Igus 로봇 제어(iRC) 소프트웨어를 통해 구현할 수 있습니다. 라이선스가 필요 없는 이 무료 애플리케이션을 통해 사용자는 델타 로봇, 코봇(로봇 암), 갠트리 로봇 등 다양한 유형의 로봇을 제어할 수 있습니다.
사용자에게 3D 인터페이스와 100개 이상의 샘플 프로그램을 제공합니다. iRC를 구현하기 위한 시스템 요구 사항에는 500MB의 디스크 여유 공간과 이더넷 또는 무선 네트워킹 연결이 가능한 Windows 10 또는 11(64비트)이 설치된 PC(최소 Intel i5 CPU)가 포함됩니다.
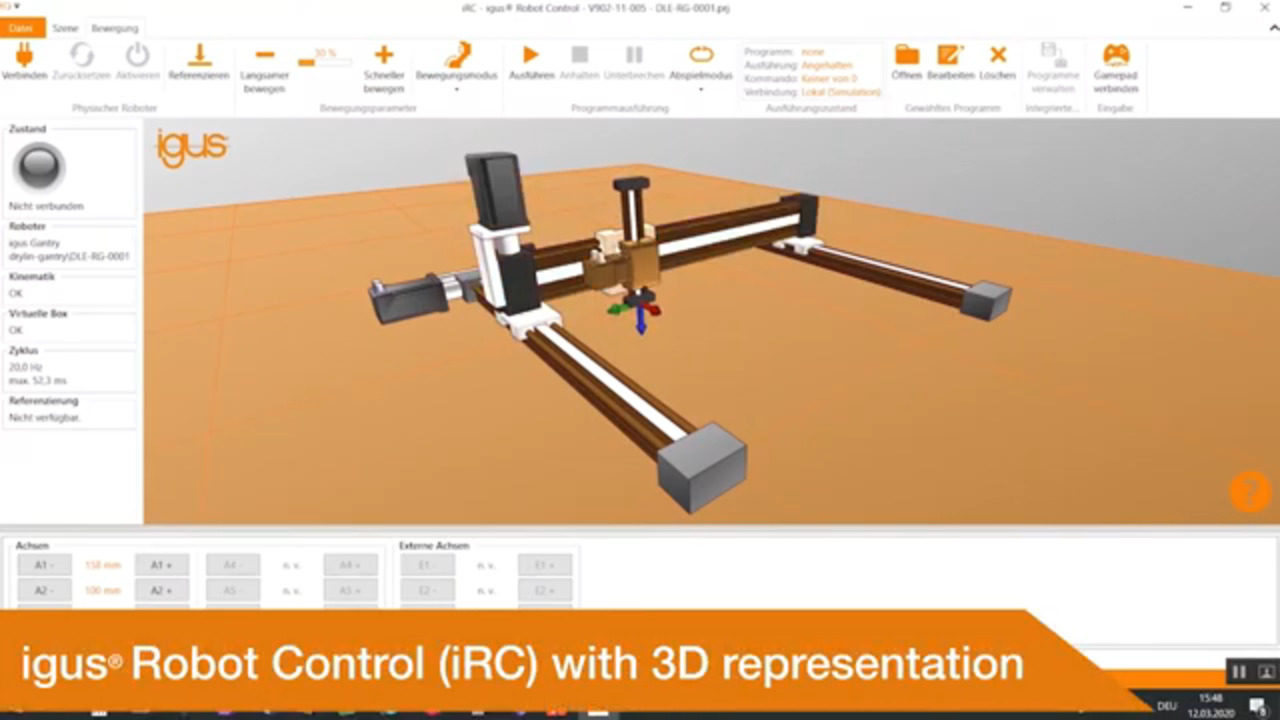
소프트웨어의 핵심은 프로그래밍 중인 로봇의 3D 디지털 트윈입니다. 예를 들어 작업 공간이 500 x 500 x 100mm인 모델 DLE-RG-0001-AC-500-500-100과 같은 3축 선형 갠트리 로봇이나 800 x 500mm 작업 공간인 모델 DLE-LG-0012-AC-800-500과 같은 2축 xy 액추에이터가 이에 해당합니다(그림 1). 설계자는 로봇을 구매하기 전에도 마우스 클릭 몇 번으로 움직임을 정의하고 3D 모델을 사용하여 필요한 움직임이 실현 가능한지 확인할 수 있습니다.
 그림 1: 이구버스 내 3축 갠트리 로봇의 3D VR 디지털 트윈 예시. (이미지 출처: Igus)
그림 1: 이구버스 내 3축 갠트리 로봇의 3D VR 디지털 트윈 예시. (이미지 출처: Igus)
iRC 소프트웨어와 더불어 로봇 컨트롤러는 이구버스 개발 환경의 핵심 요소입니다. 예를 들어 IRC-LG12-02000 모델은 48V 모터용이며 7개의 입력과 7개의 출력이 있고 로봇에 연결할 수 있는 10m 케이블이 있습니다. IRC 컨트롤러에는 다양한 크기의 바이폴라 스테퍼 모터를 위한 모터 드라이브 모듈이 포함되어 있으며 구성 또는 사전 구성이 가능합니다. 또한 다음과 같은 시스템 통합을 위한 여러 인터페이스가 있습니다:
- 디지털 입력 및 출력을 통한 제어, 특히 PLC 또는 푸시버튼을 통한 간편한 프로그램 시작 및 중지를 위한 프로그래밍 가능 로직 컨트롤러(PLC) 인터페이스
- PLC 또는 PC를 통한 제어를 위한 Modbus TCP 인터페이스
- PLC 또는 PC를 사용한 제어 및 구성을 위한 공통 로봇 인터페이스(CRI) 이더넷
- 로봇 운영 체제(ROS)를 사용하여 로봇을 작동하기 위한 로봇 운영 체제(ROS) 인터페이스
- 물체 감지 카메라용 인터페이스
- 로봇의 상태를 원격으로 모니터링하기 위한 클라우드 인터페이스
지원되는 운동학
로봇의 제어된 움직임을 정의하는 다양한 키네마틱(기본 동작)이 이구버스에서 지원됩니다. 사전 구성된 키네마틱 외에도 IRC에서 운동학적으로 독립적인 축을 최대 3개까지 추가로 구성할 수 있습니다. 사전 구성된 키네마틱에는 다음이 포함됩니다.
- 2축 및 3축 델타 로봇
- 갠트리 로봇
- 2축(X축 및 Y축)
- 2축(Y축 및 Z축)
- 3축(X, Y, Z축)
- 로봇 암(코봇)
- 3축(축 1, 2, 3)
- 3축(축 2, 3, 4)
- 4축(축 1, 2, 3, 4)
- 4축(축 2, 3, 4, 5)
- 5축(축 1 ~ 5)
- 6축(축 1 ~ 6)
- 4축 SCARA 로봇
저비용 자동화를 위한 간편한 프로그래밍
Igus 로봇과 IRC는 저비용 자동화를 지원하도록 설계되었는데, 이는 사용하기 쉬운 프로그래밍 인터페이스가 없었다면 불가능했을 것입니다. 3버튼 마우스나 게임패드로 이구버스에서 로봇을 움직이고 위치를 지정할 수 있습니다. IRC 소프트웨어를 사용하면 사용자는 3D 인터페이스에서 디지털 트윈의 모든 축을 자유롭게 움직일 수 있습니다. 티치인 기능은 실제 로봇이 연결되지 않은 상태에서도 로봇 제어 소프트웨어 개발을 지원합니다.
티치인을 구현하기 위해 사용자는 가상 로봇을 필요한 위치로 수동으로 이동하고 그 위치에서 로봇이 어떻게 움직이는지 정의합니다. 이 과정은 완전한 모션 프로파일이 생성될 때까지 반복됩니다. IRC 소프트웨어의 툴 센터를 통해 사용자는 그리퍼와 같은 엔드 이펙터를 쉽게 추가하고 로봇의 툴 센터 포인트를 자동으로 조정할 수 있습니다. 또한 상위 수준의 산업용 제어 시스템에 대한 연결도 추가할 수 있습니다.
이 프로세스는 인터페이스에서 필요에 따라 '연결', '재설정', '활성화' 버튼을 사용하여 로봇을 활성화하는 것으로 시작됩니다. IRC의 상태 LED가 녹색으로 바뀌고 상태에 '오류 없음'이 표시되어야 합니다. 이제 '조깅' 탭을 사용하여 모션 프로필을 입력할 수 있습니다(그림 2).
 in the iguverse immersive development environment (click to enlarge)") 그림 2: 이구버스 몰입형 개발 환경의 '조깅' 탭(왼쪽 하단)을 사용하여 모션 프로파일을 입력할 수 있습니다. (이미지 출처: Igus)
그림 2: 이구버스 몰입형 개발 환경의 '조깅' 탭(왼쪽 하단)을 사용하여 모션 프로파일을 입력할 수 있습니다. (이미지 출처: Igus)
갠트리 로봇
갠트리 로봇은 앞의 이구버스 예시에 포함된 것과 마찬가지로 두 개의 기본 X축, Y축, 옵션으로 제공되는 Z축으로 구성됩니다. Y축은 두 개의 평행한 X축에 연결되며 2차원 공간에서 앞뒤로 움직이며, 옵션으로 제공되는 Z축은 3차원 이동을 지원합니다.
Igus의 갠트리 로봇은 자체 윤활 플라스틱 라이너를 사용하여 기존의 볼 베어링 기반 설계보다 더 부드럽고 조용하게 미끄러지고 굴러갑니다. 이 새로운 디자인은 중소기업에 중요한 특성인 경량, 내식성, 유지보수가 필요 없는 장점을 가지고 있습니다. 또한 중소기업에게 중요한 이 로봇은 기존 갠트리 로봇보다 최대 40% 저렴하여 더 빠른 투자 수익률(ROI)을 제공합니다.
이 로봇은 부하가 높은 저속 또는 부하가 낮은 고속의 두 가지 애플리케이션에 적합한데, 대표적인 애플리케이션으로는 포장, 픽 앤 플레이스, 라벨링, 자재 취급 및 조립 작업이 있습니다.
다양한 크기로 제공됩니다. 사용 가능한 액세서리로는 커플링, 엔드 이펙터, 모터 플랜지 등이 있습니다. 중형 갠트리 로봇의 예는 다음과 같습니다.
- DLE-FG-0006-AC-650-650은 650mm x 650mm의 작업 공간을 갖춘 2차원 평면 갠트리입니다. 이 로봇은 최대 8kg의 페이로드를 처리할 수 있으며 분당 최대 20회의 동적 픽 속도를 지원합니다.
- DLE-RG-0012-AC-800-800-500은 작업 공간이 800mm x 800mm x 500mm인 3차원 갠트리로, 분당 최대 20픽의 동적 속도로 최대 10kg의 페이로드를 처리할 수 있습니다.
팔레타이징 성능
배송을 위한 제품 팔레타이징은 제조 및 물류 작업에서 일상적인 활동입니다. 이구버스의 최신 제품이자 가장 큰 제품인 XXL 대형 갠트리 로봇은 작업 공간이 2,000mm x 2,000mm x 1,500mm로 최대 10kg 팔레트화 작업에 적합합니다. 최대 6,000mm x 6,000mm x 1,500mm의 작업 공간을 갖춘 맞춤형 설계도 가능합니다.
이 갠트리 로봇은 최대 10kg의 부품을 피킹하고 최대 500mm/s의 속도로 운반하며 0.8mm의 반복성으로 팔레트 위에 놓을 수 있습니다(그림 3). Igus의 팔레타이징 로봇 솔루션은 동급 시스템보다 최대 60% 저렴합니다.
 그림 3: 팔레타이징은 제조 및 물류 운영 부문에서 흔하게 이루어지는 중요한 활동이며 갠트리 로봇을 사용하여 자동화할 수 있습니다. (이미지 출처: Igus)
그림 3: 팔레타이징은 제조 및 물류 운영 부문에서 흔하게 이루어지는 중요한 활동이며 갠트리 로봇을 사용하여 자동화할 수 있습니다. (이미지 출처: Igus)
델타 로봇
갠트리 로봇과 마찬가지로 델타 로봇은 2축 또는 3축으로 사용할 수 있습니다. 델타 로봇은 작업 공간 위에 돔 형태의 워크 엔벨로프가 장착되어 있고, 속도가 매우 빠르며 자재 취급 및 부품 배치에 자주 사용됩니다. Igus의 델타 로봇의 예는 다음과 같습니다.
- RBTX-IGUS-0047: 작업 공간 지름이 660mm인 3축 설계 로봇입니다. ±0.5mm의 정확도, 최대 페이로드 5kg, 최대 속도 0.7m/s, 분당 최대 30회의 픽을 수행할 수 있습니다(그림 4).
- RBTX-IGUS-0059: 작업 공간 지름이 700mm인 2축 설계 로봇입니다. 정확도는 ±0.5mm이며, 최대 페이로드는 5kg, 최대 속도는 2m/s이며 분당 최대 50회의 픽을 수행할 수 있습니다.
 그림 4: Igus iRC(왼쪽) 옆에 있는 3축 델타 로봇 이미지 (이미지 출처: DigiKey)
그림 4: Igus iRC(왼쪽) 옆에 있는 3축 델타 로봇 이미지 (이미지 출처: DigiKey)
다관절 암 코봇
이구버스는 다관절 암 코봇도 지원합니다. 코봇은 자유도(DOF)라고도 하는 2개에서 10개 이상의 축을 가질 수 있습니다. 일반적으로 작업 범위가 넓고 사람과 협력하여 복잡한 작업을 수행할 수 있습니다. Igus 모델 REBEL-6DOF-02는 6 DOF이며, 모델 REBEL-4DOF-02는 4 DOF입니다. 두 모델 모두 ±1mm의 정확도, 400mm의 공칭 작업 범위를 가지며 200mm/s의 선형 속도로 분당 최소 7번의 픽을 수행할 수 있습니다.
6 DOF 모델의 최대 페이로드는 2kg, 최대 도달 거리는 664mm이며, 4 DOF 모델의 최대 페이로드는 3kg, 최대 도달 거리는 495mm입니다(그림 5).
 and 6 DOF (right)") 그림 5: 4 DOF(왼쪽) 및 6 DOF(오른쪽)를 갖춘 다관절 암 코봇 (이미지 출처: Igus)
그림 5: 4 DOF(왼쪽) 및 6 DOF(오른쪽)를 갖춘 다관절 암 코봇 (이미지 출처: Igus)
요약
이구버스 몰입형 산업용 메타버스는 디지털 트윈과 VR을 결합하여 로봇 솔루션의 신속한 개발과 배포를 지원하는 툴을 제공합니다. 라이선스 없이 무료로 제공되며 클라우드 연결 없이 PC에서 로컬로 실행되도록 설계되었습니다. 로봇 없이도 로봇 솔루션을 개발하고 테스트하는 데 사용할 수 있습니다.
델타 로봇, 갠트리 로봇, 로봇 암(코봇), 스카라 로봇의 광범위한 운동학을 지원합니다. IRC에는 PLC 인터페이스, Modbus TCP/IP, CRI 이더넷, ROS 인터페이스, 물체 감지 카메라용 인터페이스, 클라우드 인터페이스 등 자동화 및 운영 요구 사항을 지원하는 다양한 인터페이스가 포함되어 있습니다. Igus의 이구버스, iRC 및 관련 로봇은 중소기업의 저비용 자동화 요구 사항을 지원하도록 최적화되었습니다.
면책 조항: 이 웹 사이트에서 여러 작성자 및/또는 포럼 참가자가 명시한 의견, 생각 및 견해는 DigiKey의 의견, 생각 및 견해 또는 DigiKey의 공식 정책과 관련이 없습니다.